欢迎来到 AirSim
AirSim是一个基于虚幻引擎(我们还有一个支持Unity的试验性版本)以模拟汽车、无人机的模拟器。AirSim仿真模拟平台是开源、跨平台、支持诸如PX4等常见的硬件在环(hardware-in-loop)飞行遥控器。AirSim是一个虚幻引擎插件,所以它可被移植到任意的虚幻环境中。同样,我们有一个试验性的Unity版本插件。
我们的目标是将AirSim发展成一个可以实验自动驾驶汽车的深度学习,计算机视觉和强化学习算法的人工智能研究平台。 为此,AirSim还公开了API,用以以独立于平台的方式检索数据和控制车辆。
查看一分三十秒的快速演示(Youtube)
AirSim中运行无人机

AirSim中运行汽车
最近更新
- 添加了天气环境和相关的 APIs
- 添加了 时刻API
- 一个试验性的 Unity上运行AirSim 目前可用。了解详情: Unity blog post.
- 新的环境:森林、平原(风车农场)、TalkingHeads(模拟人体头部)、TrapCam(通过相机进行动物检测)
- NoDisplay视图 可以关闭主屏幕渲染,以便您可以更高效地截取图像。
- Lidar传感器
- 一个机器学习的例子:方程式赛车的自动驾驶
- 多车模式
- ROS发布器
更多详情,请参考 Changelog
如何获得它
Windows
Linux

如何使用它
文档
可以参考我们有关AirSim各方面的详细文档。
人工驾驶
如果您有如下所示的遥控器(RC),您可以在模拟器中手动控制无人机。 您也可以使用方向键手动驾驶汽车。

编程控制
AirSim公开了API,因此您可以通过编程方式在仿真环境中与车辆进行交互。 您可以使用这些API来检索图像,获取状态,控制车辆等。 API通过RPC公开,可通过各种语言访问,如C ++,Python,C#和Java。
这些API也可以以独立跨平台库的方式提供,因此您可以将它们部署在车辆的计算机上。 这样,您就可以在模拟器中编写和测试代码,然后在真实车辆上执行它。 迁移学习和相关研究是我们关注的重点领域之一。
您可以修改 SimMode选项 来配置默认车辆或新的 计算机视觉模式 ,这样您就不必每次启动AirSim时都收到提示。
获取训练数据
有两种方法可以从AirSim生成训练数据以进行深度学习。 最简单的方法是点击右下角的录制按钮。这将开始记录每一帧的位置和图像。 获取数据的相关代码非常简单,您可以根据自己的需求对其进行修改。

另一个更好的方法是通过访问API,以您希望的方式生成训练数据。 因此您可以完全控制记录数据的方式,内容,位置和时间(how, what, where and when)。
计算机视觉模式
AirSim的另一个用途是所谓的“计算机视觉”模式。 在这种模式下您没有车辆,也没有物理限制。 您可以使用键盘在场景中移动,或使用API以任意姿势定位可用摄像机,然后收集如深度,视差,曲面法线或对象分割等图像数据。
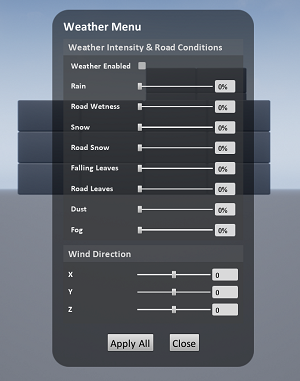
天气状态
按下键盘“F10”来查看可以使用的天气状态。您也可以通过APIs来控制天气。按下键盘"F1"来查看别的可用选项。
教程
- Video - Setting up AirSim with Pixhawk Tutorial by Chris Lovett
- Video - Using AirSim with Pixhawk Tutorial by Chris Lovett
- Video - Using off-the-self environments with AirSim by Jim Piavis
- Reinforcement Learning with AirSim by Ashish Kapoor
- The Autonomous Driving Cookbook by Microsoft Deep Learning and Robotics Garage Chapter
- Using TensorFlow for simple collision avoidance by Simon Levy and WLU team
参与
Paper
更多的细节都在下面这篇论文:AirSim paper (FSR 2017 Conference)。请以下面的格式引用该论文:
@inproceedings{airsim2017fsr,
author = {Shital Shah and Debadeepta Dey and Chris Lovett and Ashish Kapoor},
title = {AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles},
year = {2017},
booktitle = {Field and Service Robotics},
eprint = {arXiv:1705.05065},
url = {https://arxiv.org/abs/1705.05065}
}
贡献
如果您希望贡献自己的一份力量,请解决 open issues 里的问题。
谁在使用AirSim?
这份列表包含我们已知的,在使用AirSim的项目、研究人员或研究团队。如果您想进入此份列表,请在此提交您的请求。
联系我们
欢迎加入我们的 Facebook 小组。
问与答
如果您还有问题,请参阅 FAQ,也可以在代码仓库中给我们提 Issue 。
许可
该项目根据MIT许可证发布。